Control de motores
El motor eléctrico es un dispositivo que convierte la energía eléctrica en energía mecánica. Utiliza la electricidad y los campos magnéticos para producir par motor para girar el rotor y, por tanto, generar trabajo mecánico.
Control de motores
El motor eléctrico es un dispositivo que convierte la energía eléctrica en energía mecánica. Utiliza la electricidad y los campos magnéticos para producir par motor para girar el rotor y, por tanto, generar trabajo mecánico.











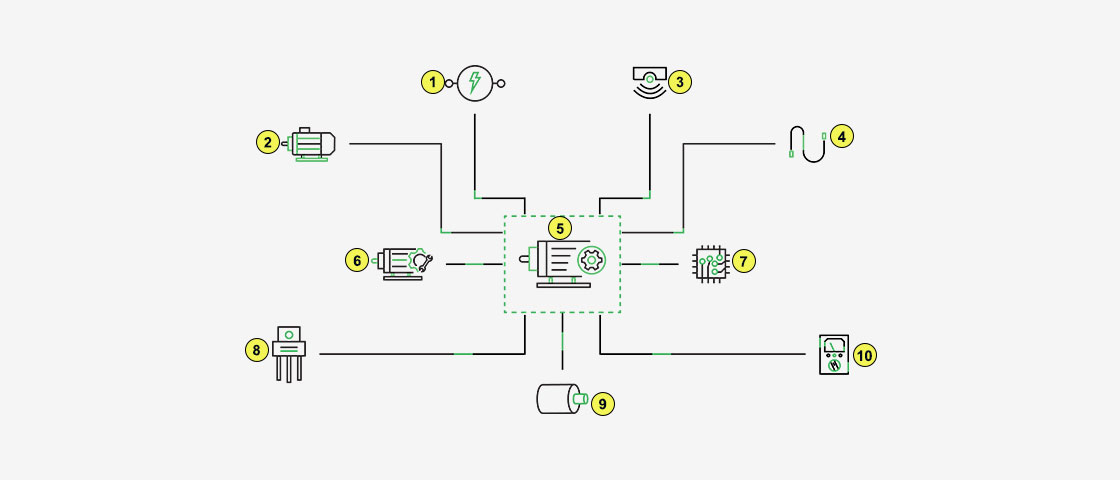
Según la aplicación en la que se utilice el motor, los motores se controlan mediante sistemas de control computarizados, como controles lógicos de estado sólido o controladores lógicos programables (PLC) para controlar y gestionar su par motor, velocidades, y el trabajo o energía generados. Los controladores de motores pueden tener muchas características que pueden incluir entre otras el arranque, la parada, la protección contra sobrecorrientes, la protección contra sobrecargas, la reversa, el cambio de velocidad, las marchas y el control de secuencia. Los controladores de motores varían en complejidad y pueden ofrecer control para uno o varios motores.
Los motores generalmente se clasifican en dos categorías: motores CA y motores CC, según la fuente de energía eléctrica que utilizan.
Los tipos de motor CC son: serie, derivación/paralelo y compuesto, según la forma en que están dispuestas las bobinas y las armaduras de los circuitos. Otros tipos de motores CC son los motores de imán permanente (PMDC) y los motores de excitación independiente.
Los tipos de motor CA son: los motores de inducción de CA (también conocidos como motores asíncronos) y los motores síncronos. Estos se dividen por aplicación en motores unifásicos, trifásicos, de inducción de jaula de ardilla, de doble tensión etc.
También existen otros tipos de motores, como los motores CC sin escobillas, los motores de paso, los motores de reluctancia, los motores de histéresis y los motores universales. Read More
How-to

Explore MCU-less sinusoidal control for PMSMs, which provides silent, smooth motion in high-end appliances and automation.
How-to

Explore the advantages of using optically coupled sigma-delta modulators in industrial motor control systems for precise current and voltage sensing, replacing bulky, less accurate traditional methods with a compact, cost-effective solution that minimizes power dissipation across shunt resistors.
Blog

Explore the shift from mechanical to electric drives in automotive and industrial applications. Discover benefits like energy efficiency, flexible control, smaller size, and lower maintenance.
How-to

Explore the evolution of industrial electric motors with electronic controllers. Learn improved effectiveness and capabilities in a wide range of applications across industries.
How-to

This article explains how developments in motion control, power conversion, and embedded electronics led to motor controllers, also known as Motor Control Units (MCUs).
Article

In this article, we will look at the current scenario, investigate the issues that occur, answer important concerns, and propose novel solutions, giving you with a road map to mastering the art of precise motion control in industrial motor control.
How-to

How to ensure safety integrity level (SIL) using Fail- Safe Motor Control Technology.
Article

Learn how the Renesas RZ/T2M servo motor control device provides a cost-effective and efficient solution with its rich set of features, powerful CPU core, and embedded security.
Los motores CC con escobillas (BDC) reciben su nombre de las escobillas utilizadas para la conmutación. Los motores CC con escobillas se usan frecuentemente en electrodomésticos y automóviles. También conservan un nicho industrial fuerte debido a su capacidad para alterar la relación par motor-velocidad exclusiva de los motores con escobillas. Los BDC son fáciles de controlar porque la velocidad y el par motor son proporcionales a la tensión / corriente aplicadas.
Un motor CC con escobillas está compuesto de cuatro componentes básicos: el estator, el rotor (o armadura), las escobillas y el conmutador. El rotor, también conocido como la armadura, está compuesto por una o varias bobinas. Cuando estás bobinas se energizan, producen un campo magnético. Los polos magnéticos de este campo del rotor se verán atraídos por los polos opuestos generados por el estator, lo que causará que el rotor gire. A medida que el motor gira, las bobinas se energizan constantemente en una secuencia diferente para que los polos magnéticos generados por el rotor no sobrepasen los polos generados en el estator. Este intercambio en el campo magnético de las bobinas del rotor se llama conmutación. La dirección de la rotación, con o contra las manecillas del reloj, se puede revertir fácilmente revirtiendo la polaridad de las escobillas, es decir, revirtiendo los contactos en la batería.
Existen cuatro tipos de motores BDC. Los motores CC con escobillas de imán permanente, los motores CC con escobillas con excitación en paralelo, los motores CC con excitación en serie y la cuarta son los motores CC sin escobillas con excitación mixta, que es una combinación de los motores CC con escobillas con excitación en paralelo y en serie.
El motor CC sin escobillas (BLDC) también se conoce como un motor conmutado electrónicamente. El rotor no tiene escobillas y la conmutación se realiza de forma electrónica en ciertas posiciones del rotor. Un motor BLDC es un motor síncrono de imán permanente con forma de onda de fuerza contraelectromotriz única que le permite comportarse de forma similar a un motor CC con escobillas. El motor BLDC no funciona directamente a partir de una fuente de tensión CC. Sin embargo, el principio básico de funcionamiento es similar al de un motor CC.
Un motor CC sin escobillas tiene un rotor con imanes permanentes y un estator con bobinas. Un motor BLDC es esencialmente un motor CC de adentro para afuera. Las escobillas y el conmutador se han eliminado y las bobinas están conectadas con la central electrónica. La central electrónica reemplaza la función de un conmutador y activa el bobinado adecuado siguiendo un patrón de rotación en torno al estator, y el bobinado activado del estator controla el imán del rotor y conmuta justo cuando el rotor se alinea con el estator.
El motor CC sin escobillas es ideal para aplicaciones que requieren gran fiabilidad, alta eficiencia y una alta relación potencia-volumen. En general, un motor BLDC se considera como un motor de alto rendimiento, capaz de ofrecer grandes cantidades de par motor en un amplio intervalo de velocidad.
Uno de los motores eléctricos más comunes utilizados en la mayoría de las aplicaciones es el motor de inducción. Este motor también se conoce como motor asíncrono, ya que el rotor siempre gira a una velocidad menor a la del campo, convirtiéndolo en un motor CA asíncrono. Gira a una velocidad menor a la de su velocidad síncrona. Los motores de inducción de CA son unifásicos o polifásicos. El sistema de potencia unifásico se utiliza ampliamente en comparación con el sistema trifásico para uso doméstico, comercial y, hasta cierto punto, industrial.
El estator del motor consiste en una derivación superpuesta del bobinado. Cuando la bobina primaria o el estator están conectados a una fuente eléctrica CA, se establece un campo magnético giratorio que da vueltas a una velocidad síncrona. La velocidad teórica del rotor en un motor de inducción depende de la frecuencia de la fuente CA y del número de bobinas que conforman el estator y, sin carga en el motor, se aproxima a la velocidad del campo magnético giratorio. Gira a una velocidad constante, a menos que se emplee un controlador de frecuencia variable.
La mayor ventaja de los motores de inducción CA es su gran simplicidad. Solo tienen una parte móvil, el rotor, lo que los hace económicos, silenciosos, duraderos y relativamente poco problemáticos. Los motores de inducción pueden ser bastante pesados y voluminosos debido a las bobinas. Los motores de inducción trifásicos se utilizan ampliamente en controladores industriales, ascensores, grúas, maquinaria de tornos, etc., puesto que son resistentes, fiables y económicos. Los motores de inducción unifásicos se usan ampliamente para cargas más pequeñas, como en electrodomésticos como ventiladores, bombas, mezcladoras, juguetes, aspiradoras, taladros, etc.
El motor síncrono de imán permanente (PMSM) es un montón síncrono CA cuya excitación de campo proviene de imanes permanentes, y que tiene una forma de onda de fuerza contraelectromotriz senoidal. El PMSM es un cruce entre un motor de inducción y un motor CC sin escobillas. Como con los motores CC sin escobillas, tiene un rotor de imán permanente y bobinas en el estator. Sin embargo, la estructura del estator con bobinas construidas para producir una densidad de flujo senoidal en el vacío de aire de la máquina se parece a la de un motor de inducción. Su densidad de potencia es mayor que la de los motores de inducción en los mismos rangos, ya que no cuenta con potencia del estator dedicada a la producción de campos magnéticos.
Con los imanes permanentes, el PMSM puede generar par motor a velocidad cero y requiere un inversor controlado digitalmente para su funcionamiento. Los PMSM se utilizan generalmente para controladores de motor de alto rendimiento y alta eficiencia. El control de motores de alto rendimiento se caracteriza por una rotación uniforme en todo el rango de velocidad del motor, control total de par motor a velocidad cero y aceleración y desaceleración rápidas.
Para lograr tal control, los PMSM utilizan técnicas de control vectorial. Las técnicas de control vectorial también se conocen con frecuencia como control de campo orientado (FOC). La idea básica del algoritmo de control vectorial es descomponer la corriente del estator en una parte generadora de campo magnético y una parte generadora de par motor. Ambos componentes se pueden controlar de forma separada tras la descomposición.
Un motor de paso es un motor eléctrico CC sin escobillas que divide una rotación completa en varios pasos iguales. Rota una distancia incremental específica por cada paso. El número de pasos que se ejecutan controla el grado de rotación del eje del motor.
Los motores de paso tienen cierta capacidad inherente para controlar la posición, ya que tienen pasos de salida integrados. Pueden controlar con gran precisión cuán lejos y cuán rápido rotará el motor de paso. El número de pasos que ejecuta el motor es igual al número de comandos de pulsos del controlador. Un motor de paso rotará una distancia y a una velocidad proporcional al número de la frecuencia de sus comandos de pulso.
Un controlador de motor de paso puede ser de lazo abierto o cerrado. La diferencia entre los dos es que un sistema de lazo abierto envía una potencia consistente de alimentación al motor, asumiendo que el campo rotacional que sigue el rotor sea consistente. Un sistema de lazo cerrado utiliza retroalimentación para ajustar la alimentación basado en el tipo de carga del motor. La mayoría de las aplicaciones de motor funciona con un sistema de lazo abierto, porque es más simple y menos costoso.
Los motores de paso tienen varias ventajas en comparación con otros tipos de motores. Una de las más impresionantes es la capacidad de posicionarse con gran precisión. Puede alcanzar la misma posición objetivo, revolución tras revolución. Los motores de paso estándar tienen una precisión de ángulo de paso de +/-5%. El error no se acumula de paso a paso.
Un servomotor es un actuador giratorio o lineal que permite un control de alta precisión y alta respuesta de la posición, la velocidad y la aceleración angular o lineal. Como un motor capaz de un ángulo de rotación y un control de velocidad precisos, se puede usar para una variedad de equipos. Se emplean en aplicaciones como robótica, maquinaria CNC o fabricación automatizada y generalmente como una alternativa de alto rendimiento para los motores de paso.
Los sistemas servo combinan un motor servo de alto rendimiento con un amplificador servo (controlador) para lograr una posición, una velocidad o un control de par motor extremadamente precisos. Los servomotores tienen engranajes integrados y un eje que se puede controlar de forma precisa. Los circuitos servo se construyen dentro de la unión del motor y tienen un eje posicionable que generalmente incluye un engranaje. El motor lo controla una señal eléctrica que determina la cantidad de movimiento del eje.
En un control de lazo cerrado, se monta un detector de rotación (encoder) en el motor y alimenta la posición / velocidad de rotación del eje del motor de vuelta al controlador. El controlador calcula el error de la señal de pulsos o de la tensión analógica (comando de posición / comando de velocidad) desde el controlador y la señal de retroalimentación (posición / velocidad de la corriente) y controla la rotación del motor para que el error se convierta en cero. El método de control de lazo cerrado se logra con un controlador, un motor y un encoder, para que el motor pueda realizar operaciones de posicionamiento de gran precisión. En un sistema de control de posiciones, un controlador entra la señal de pulsos y luego la velocidad y la posición de parada se controla acuerdo con el número de pulsos.
¡Una de las más grandes revoluciones en la historia de la humanidad! La inteligencia artificial es un concepto integral que incorpora la inteligencia humana a las máquinas
The #1 Destination for Embedded Evaluation Boards, Development Kits, and Tools
Ampliamos continuamente nuestra biblioteca de documentación, artículos técnicos, vídeos, módulos de formación, instructivos y más para apoyarle en el desarrollo de su diseño, su empresa y su carrera